夹持时抑制被测物姿态偏差
・问题
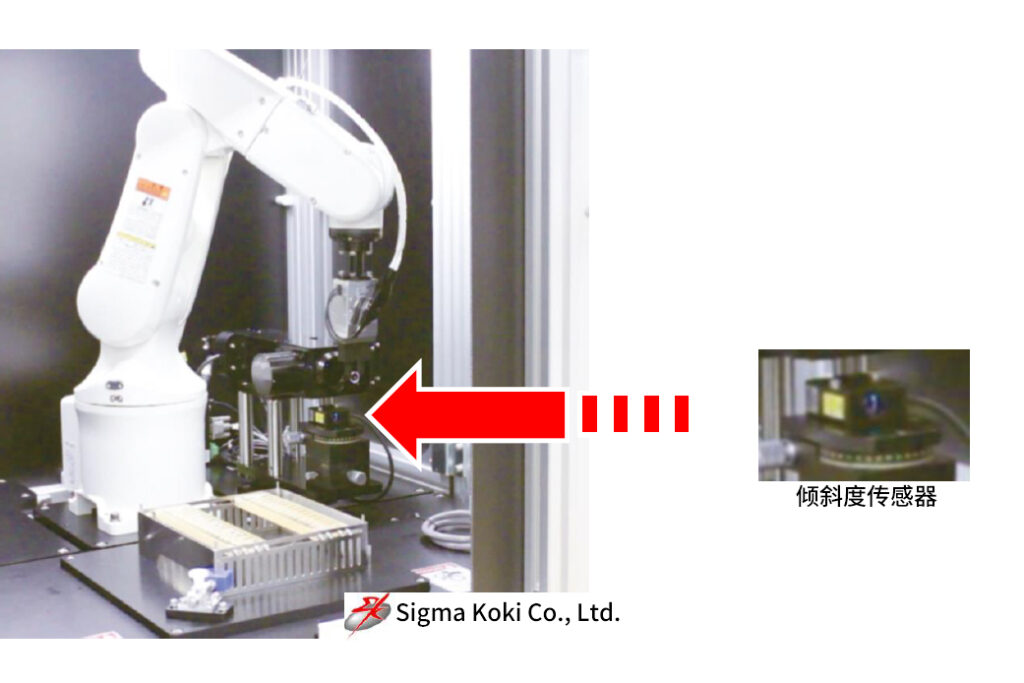
在自动外观检测工序中,由机器人对被测物进行夹持。希望改善此过程中产生的姿态(角度)偏差。
・解决方案
通过传感器测量被测物在夹持状态下的姿态(角度)和位置(焦距),并将测量数据反馈给机器人,即可实现稳定的定位控制。基于测量数据的定位方式,不仅能够缩短图像检测中的自动对焦时间,还可通过姿态补正(倾斜补偿)提升检测精度。
SOLUTIONS
解决方案案例
・问题
在自动外观检测工序中,由机器人对被测物进行夹持。希望改善此过程中产生的姿态(角度)偏差。
・解决方案
通过传感器测量被测物在夹持状态下的姿态(角度)和位置(焦距),并将测量数据反馈给机器人,即可实现稳定的定位控制。基于测量数据的定位方式,不仅能够缩短图像检测中的自动对焦时间,还可通过姿态补正(倾斜补偿)提升检测精度。


